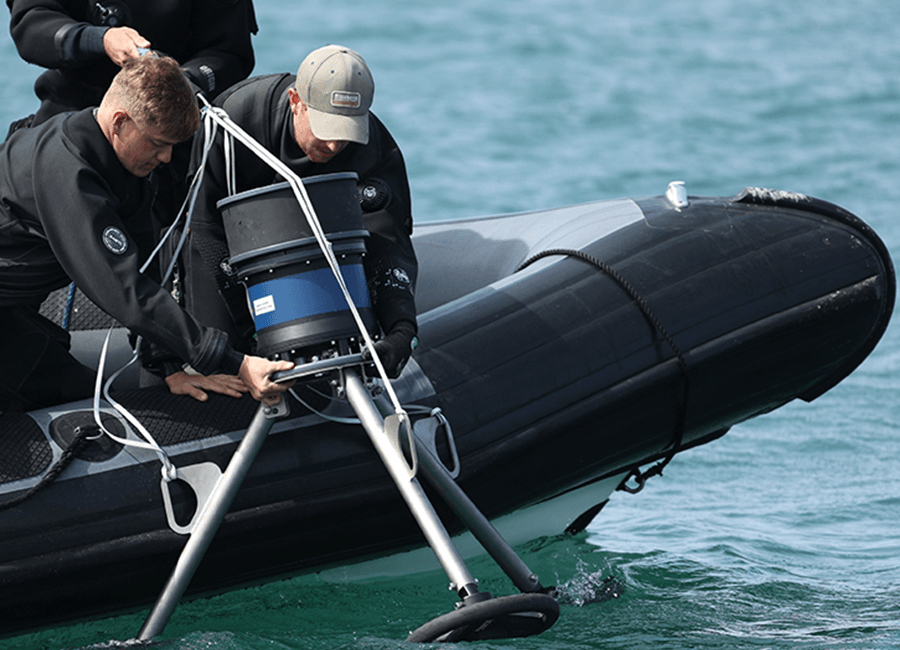
What is the minimum and maximum water depth for the correct operation of diver detection sonars?
The sonars should generally be installed at depths between 2m and 30m; we provide guidance on the optimum deployment depth based on the local environment (particularly water depth and sound speed profile). The sonars can detect and track when looking into water as shallow as 1m, though we do not recommend installing the sonars in less than 2m (and deeper for tidal areas). The maximum depth the sonar will detect and track is very dependent of the sound speed profile at the installation site. In isovelocity conditions in very deep water (>>100m) the vertical field of view of the sonar will give coverage to up to 100m depth. However this may be less if the sound speed profile results in upward refraction.
What are the minimum and maximum temperatures for the correct operation of intuder detection sonars?
The sonars can operate in water temperatures between -10 and +40 deg C.
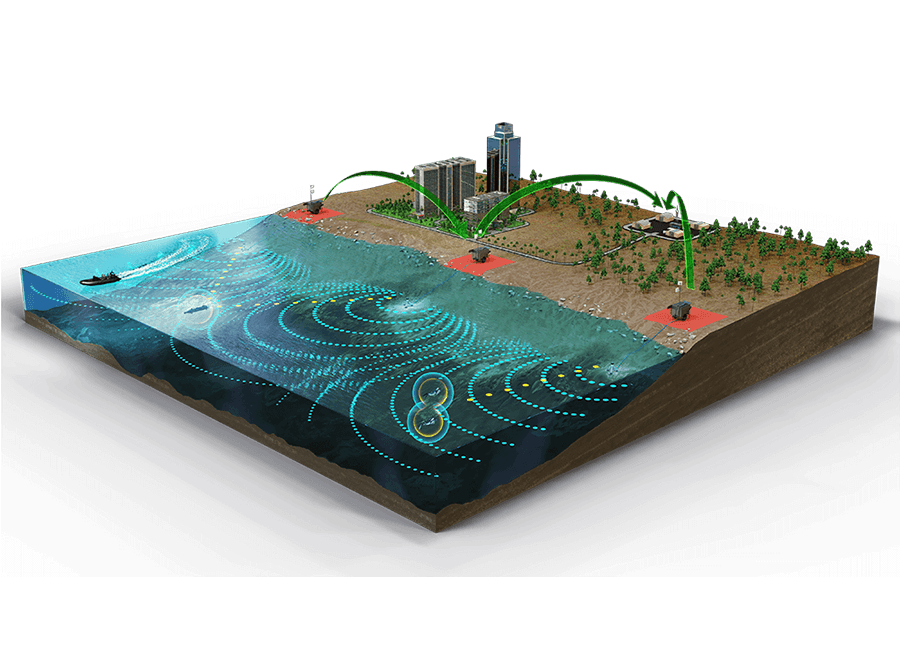
What is the average underwater area that can be adequately monitored with an intruder detection sonar?
The area coverage varies depending on the local environmental conditions (primarily water depth, sediment type and sound speed profile). In cooler climates such as Europe we typically expect around 600m range, which equates to a circle of area 1.13 km². In good propagation conditions we can achieve up to 900m range against divers (2.54 km²).
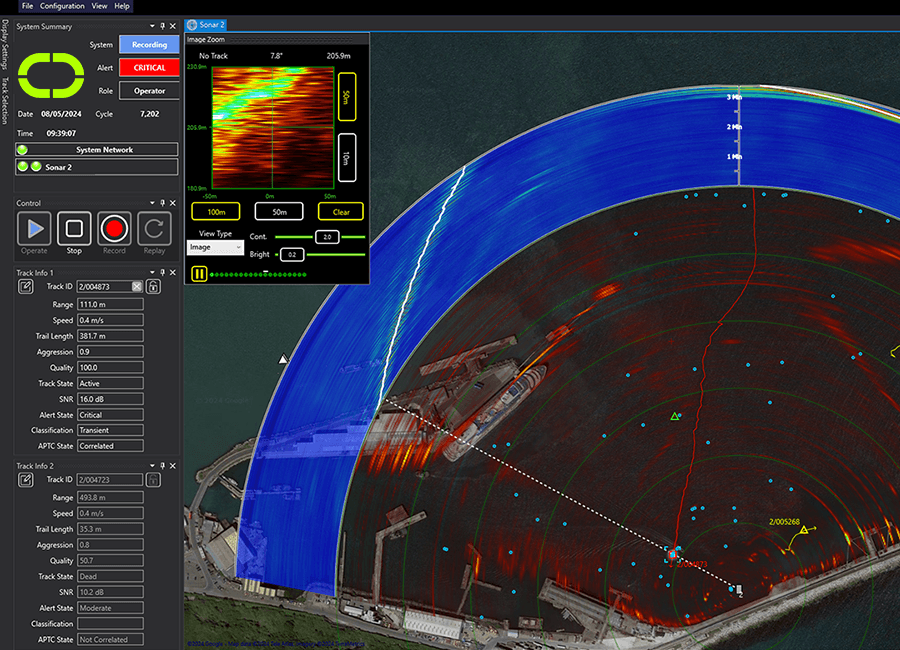
Sentinel 2 features SInAPS, what is this technology?
SInAPS® (Simultaneous In-band Active and Passive Sonar) technology, unique to Wavefront, combines the detection and tracking capabilities of active and passive sonar. SInAPS® draws on the use of both active and passive sonar technologies when tracking low-target-strength drones or very slow-moving targets in highly cluttered seabed conditions, typical of some harbour settings. Without compromising the active tracker, SInAPS uses the processing gain of the Sentinel array, along with its high bearing resolution, to simultaneously passively track targets. SInAPS then combines the spatially co-registered output from the active and passive trackers.SInAPS’ real power lies in its ability to classify and establish threats that would have previously taken much longer to identify. Imagine a situation where a small drone is moving under the cover of a harbour wall; a challenge for any active system. The use of passive sonar allows Sentinel to correlate mechanical noise and intermittent detections to immediately establish the presence of a threat. This reduces alert time and increases response time. Once detected, a passive track that is correlated to an active track (using our latest APTC feature), is immediately flagged as ‘Severe’ and an on onscreen marker appears showing the correlated detections.
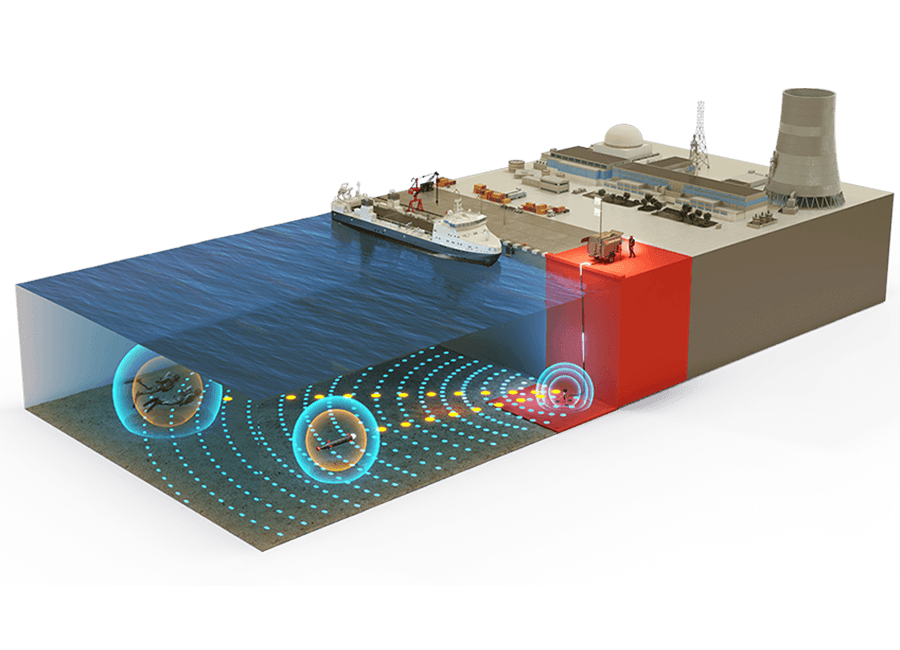
To what extent are intruder detection sonars resistant to strong currents and passing ocean-going vessels?
When permanently installed on seabed stands or fixed to jetties, the sonars are not damaged by strong currents or passing vessels. Generally currents do not affect detection performance; however strong currents can result in floating debris moving through the sonar field of view in a similar way to threat targets. Sentinel has special software to identify and ignore tracks generated by current-driven targets.
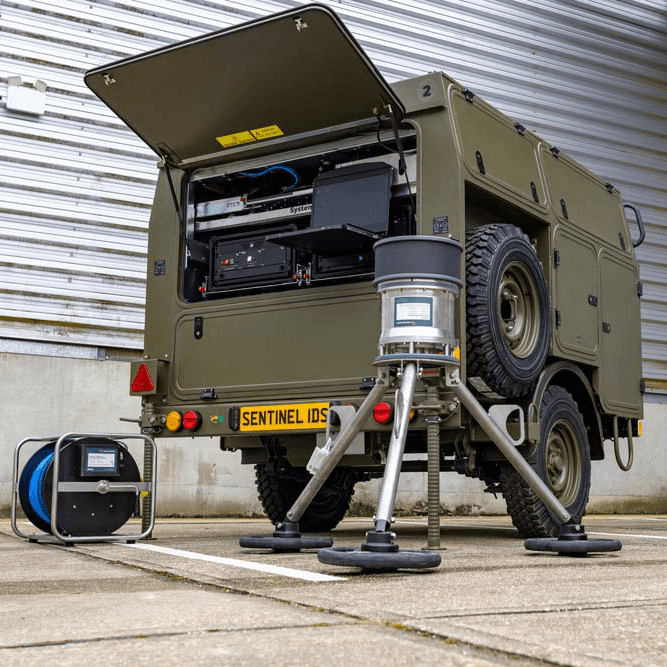
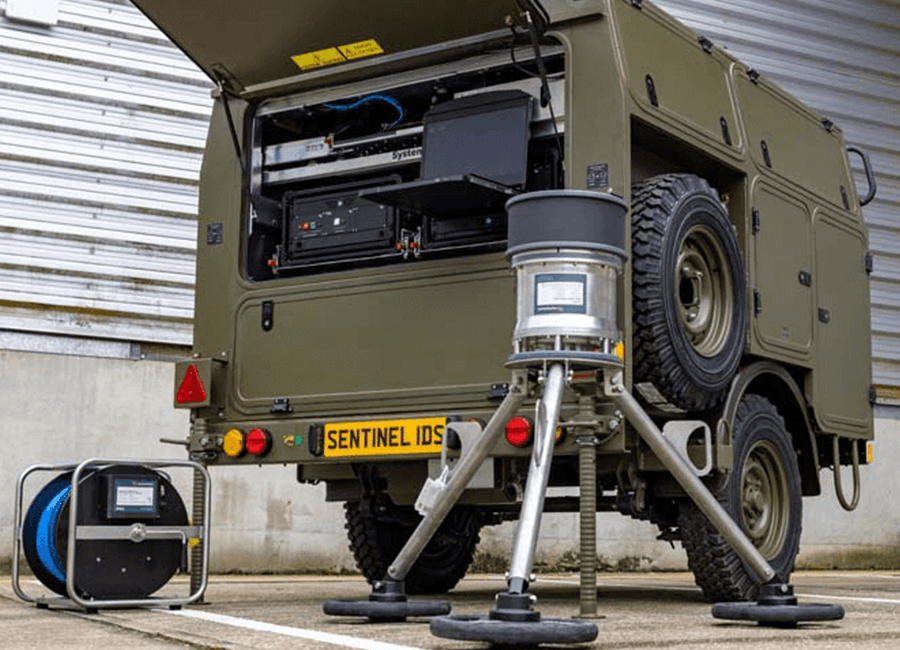
For practical use, a mobile setup must function without a direct connection to an electrical grid. To what extent is this possible? What must be taken into consideration for such a setup?
We have a version of the expeditionary Sentinel system which can be run from 24V DC batteries.