What is the sonar frequency and why?
The selected frequency of 70kHz provides an optimum design for power, size, range and background noise discrimination. Also, extensive analysis details how we are confident, based on the latest NOAA guidelines, that Vigilant will do no harm to marine fauna that may be listening in.
Why is the system designed in two parts?
The projector and receiver are both optimised for size while being necessarily dimensioned to achieve high performance in both range and elevation (depth). The physics of the underwater environment necessitates the dimensions – smaller will equal lower performance.
High resolution is an important feature of any sensor. For sonar the resolution is inversely proportional to the length of the transmitter and receiver arrays. To achieve high elevation resolution ‘taller is better’. Our system uses a separate vertical projector array to achieve elevation beamwidths of 2.5°, which are frequency encoded and steered over the entire 20° vertical field of view.
How does it integrate with the vessel’s bridge systems?
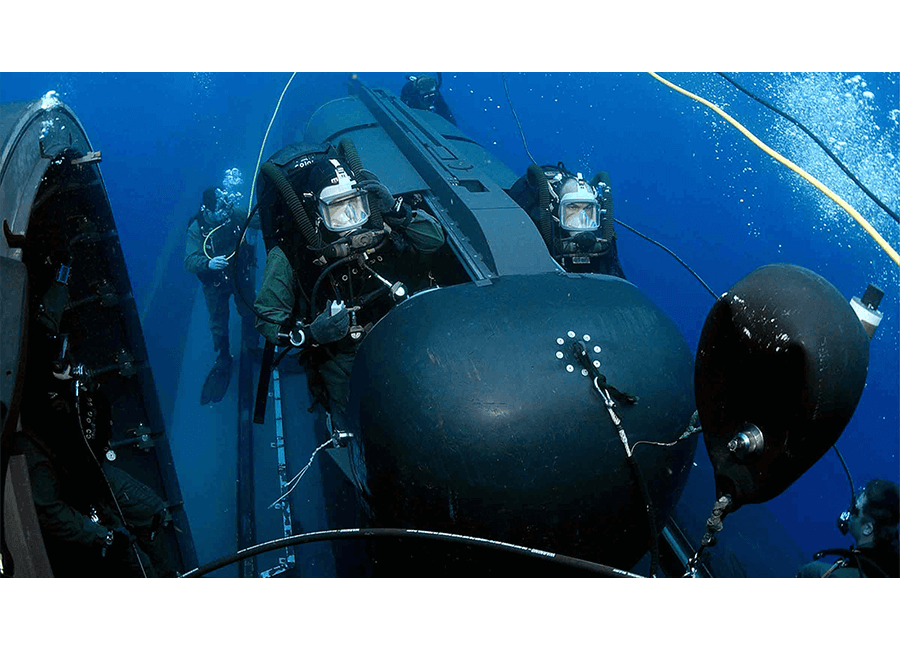
Vigilant is designed to be operated from stand-alone or multi-function consoles on the bridge, with operator input either using a touch-screen or tracker ball. The interface to the consoles is usually via a user-supplied KVM switch. Additionally, all Vigilant data and controls are available to external systems via a TCIP ethernet comms port. This is particularly useful for uncrewed vessels to interface to autopilots or remote control systems. Additionally, for some applications (such as manned submersibles) the user may wish to implement their own GUI. A fully detailed ICD is available on request. Pre-designed and fully tested ECDIS integrations for some ECDIS systems are also available, allowing Vigilant data to be displayed in the ECDIS GUI.
Does Vigilant require GPS or navigation data?
Yes. Vigilant integrates the vessel’s navigation system. A GNSS receiver or an inertial navigation system, e.g. SPRINT-Nav from Sonardyne. This is required to enable the system to geo-reference the data and to stabilise the sensors. The necessary interface is described in the Vigilant Navigation Interface Guide, which can be provided on request.
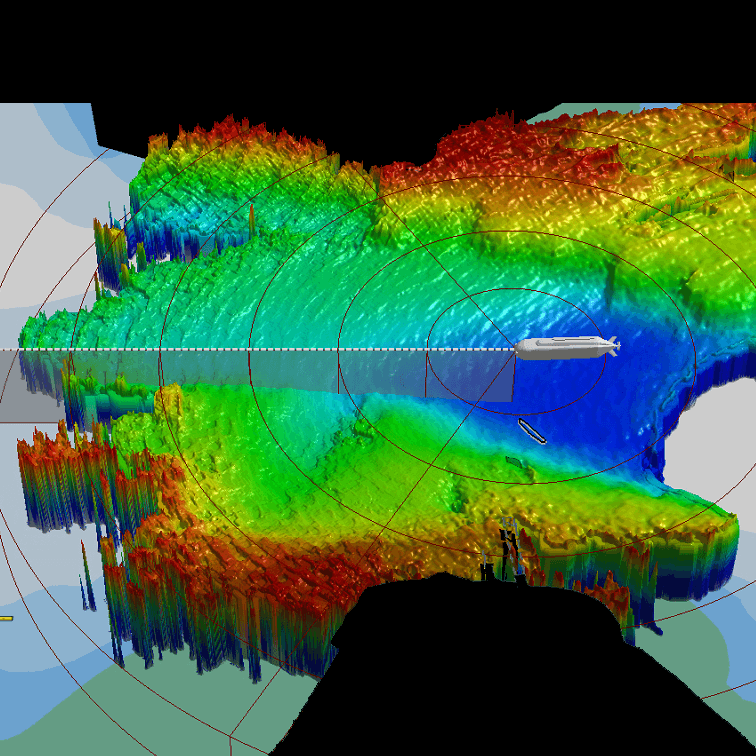
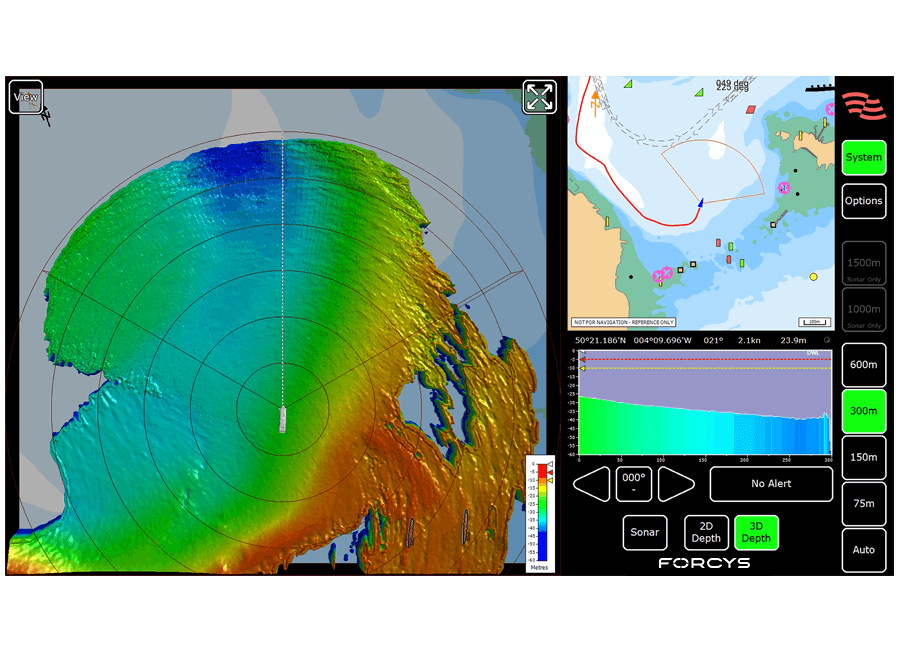
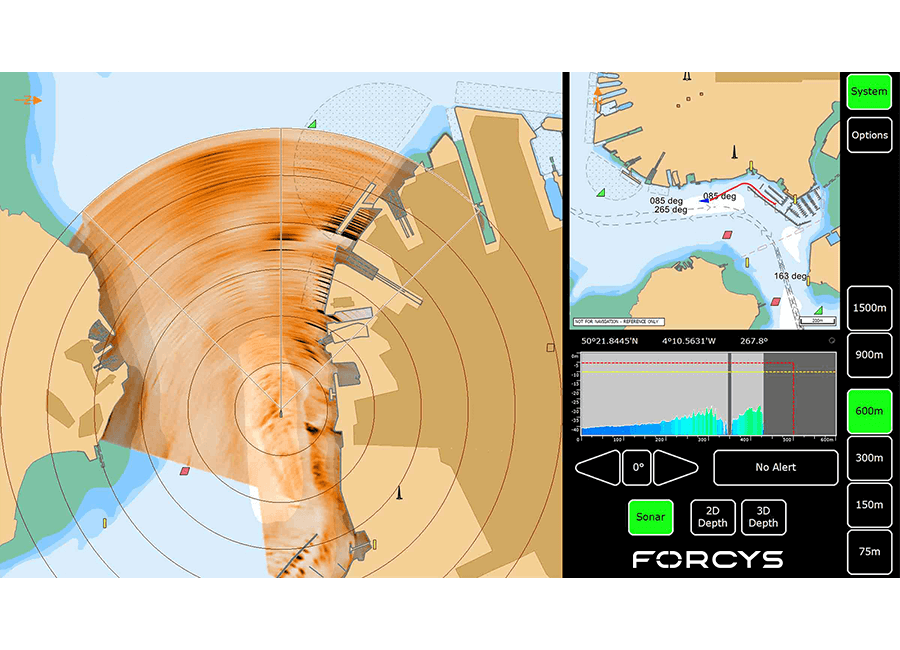
What is the difference between Sonar and Depth Modes?
In Sonar Mode the system detects objects and the seabed at greater range and shows a sonar image but no depth information. This mode is used to provide navigational references in harbour environments and to prevent collisions when in open water. In Depth Mode the system provides both the range and the depth information. This can be used to aid grounding avoidance and collision avoidance. In this mode the data can either be displayed as a colour coded 2D plan view or a totally customisable 3D view.